Проект Heaxapod вырос: шестиногий робот понесет на себе двоих наездников и груз
Проект Hexapod имеет давнюю историю. О первом миниатюрном
роботе этого проекта мы
писали пять лет назад. Теперь сочетание студенческих проектов по
робототехнике и принципов открытого кода вышло на новый уровень. Предполагается,
что такой подход поможет на один-два порядка удешевить создание крупных роботов
силами энтузиастов. Во-первых, гидравлические сервоприводы больших размеров
теперь сможет изготовить любая мастерская по готовым чертежам. Во-вторых,
контроллеры и программы к ним тоже станут общедоступными.
На данный момент участники проекта разработали численную
модель движущейся платформы с гидравлическим приводом и компьютерным
управлением. Первое тестирование концепции проходит на «железной» модели
масштаба 1:2, но в распоряжении исследователей уже есть двигательная установка
и гидравлическая часть в полном масштабе. Кроме того, на 80% завершено
строительство финального шасси, а основные усилия сосредоточены на постройке
прототипа ноги робота. Сборку первого опытного образца в полном размере
планируется начать после четырехнедельного сбора необходимых средств через
систему общественных инвестиций Kickstarter. Сама сборка должна занять около
восьми месяцев.
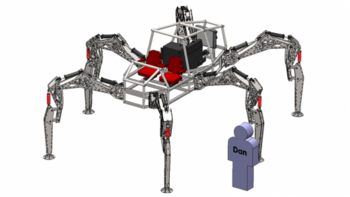
Робот Stompy – это не просто гипертрофированная вьючная
шестиногая повозка. Его шесть гидравлических ног с силовой обратной связью и
клиренс до 1,8 м позволяют легко преодолевать пересеченную местность и водные
препятствия. При движении по непроходимой поверхности Stompy может нести на
себе 450 кг груза со скоростью 3-5 км/ч, либо до 1800 кг на скорости 1,5 км/ч. Такие способности очень пригодятся в спасательных операциях при
стихийных бедствиях.
На сборку первого полноценного робота авторы собирают 65 000
долл. Каждая из шести робо-ног обойдется примерно в 6000, а «туловище» весом в 450 кг – еще 29 тысяч долл. Если все пойдет удачно, авторы планируют дальнейшие улучшения устройства, на что им понадобится еще 95 и 125 тыс. долл. соответственно. В
частности, в проекте значатся новые сенсоры для ориентирования и передвижения
на пересеченной местности, а также «обновление интуиции» (Flair Upgrade) с
созданием роботизированной головы, кузова с камуфляжем, аудиосистемы и
пиротехнических эффектов.
На данный момент в проекте Hexapod участвуют 3 преподавателя,
1 ассистент и 15 студентов. Если проекту удастся собрать полную сумму в 300 тыс.
долл., авторы хотят купить водяной резак по металлу и открыть его для
публичного использования. Также авторы хотят создать отдельную компанию для
разработки открытой робототехники и финансирования будущих проектов из
собранных средства. Срок текущего сбора средств заканчивается 2 сентября
текущего года. Остается лишь гадать, насколько большими и опасными окажутся
творения энтузиастов на базе открытых чертежей и программ проекта Hexapod,
которые можно найти на официальном сайте по адресу projecthexapod.com/blog.
Оставьте Ваш комментарий или мнение о новости: Проект Heaxapod вырос: шестиногий робот понесет на себе двоих наездников и груз Просим Вас оставлять сообщения по теме и уважать своих собеседников и авторов новостного сообщения.